画像パート 画像処理編#
このNotebookは,情報科学演習の画像パート画像処理編に関する資料とコードをまとめたものです.
基本的には,以下の流れで進めます.
目標
デジタル画像処理の基礎知識
基本的な画像処理
1. 目標#
画像処理編の目標は以下の3点です.
画像処理の基礎知識の復習
基本的な画像処理のサンプルコード実行(Python)
画像の読み込み
グレースケール変換
輝度平滑化
…
演習課題を通して画像処理体験
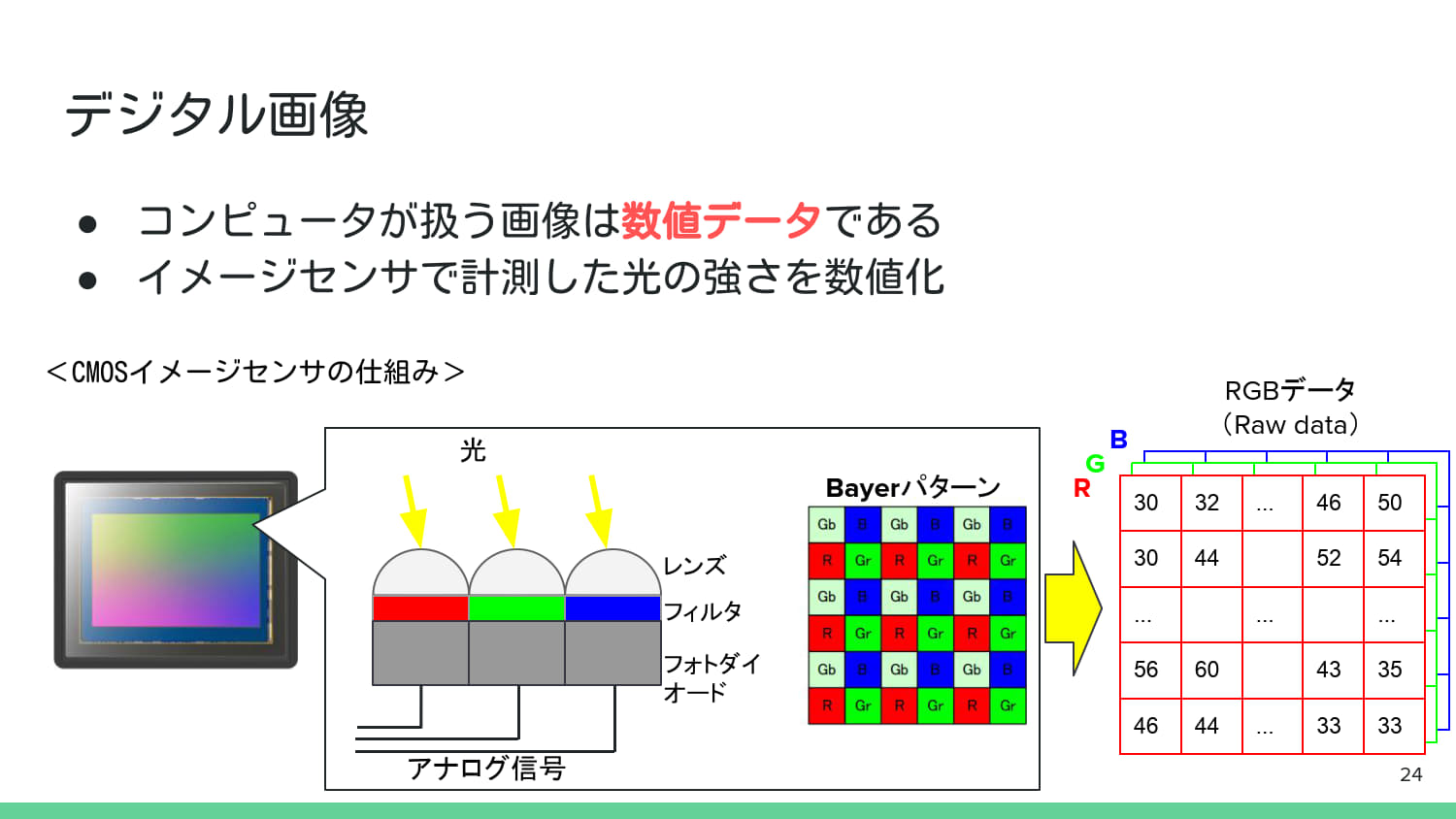
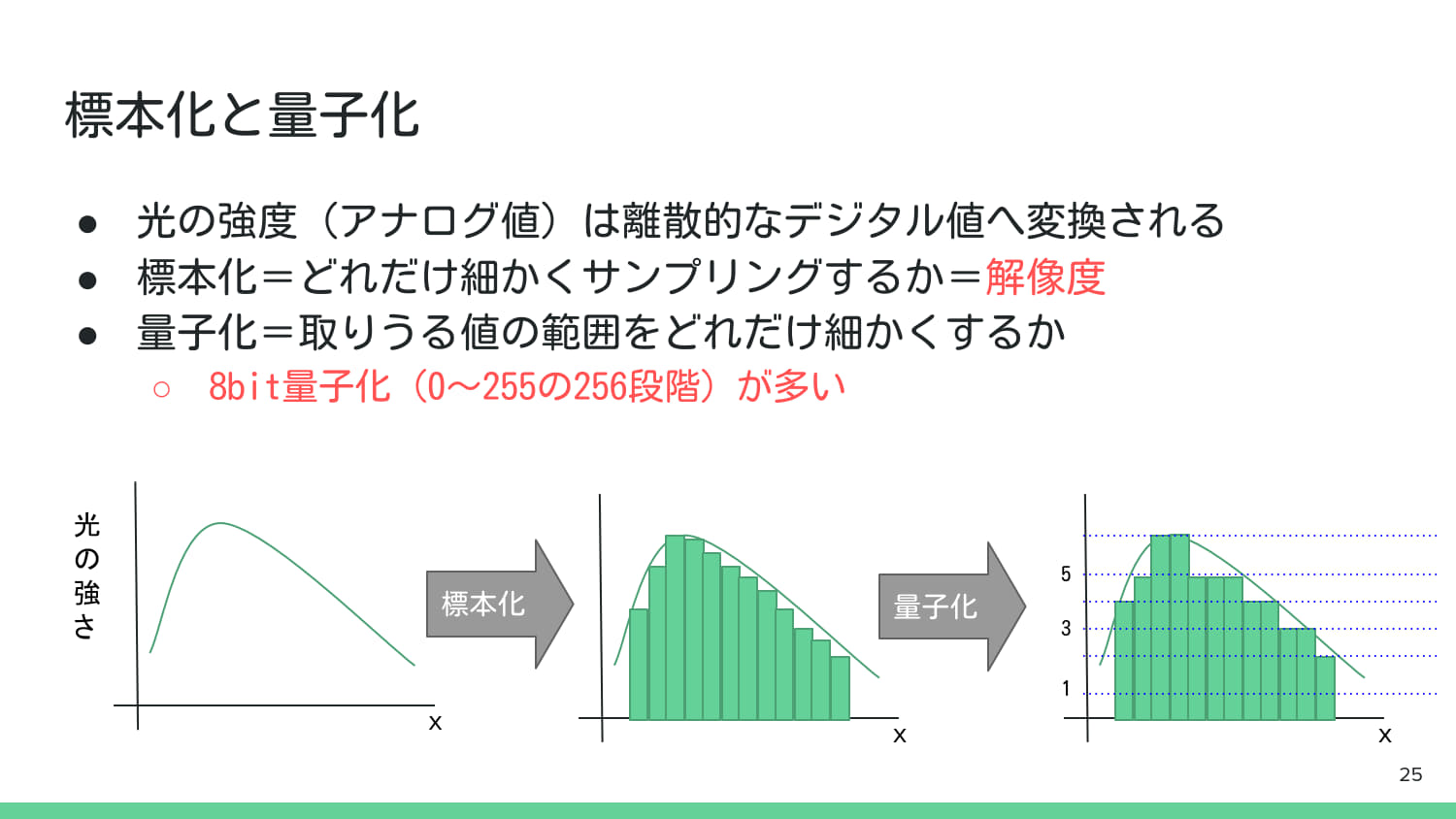
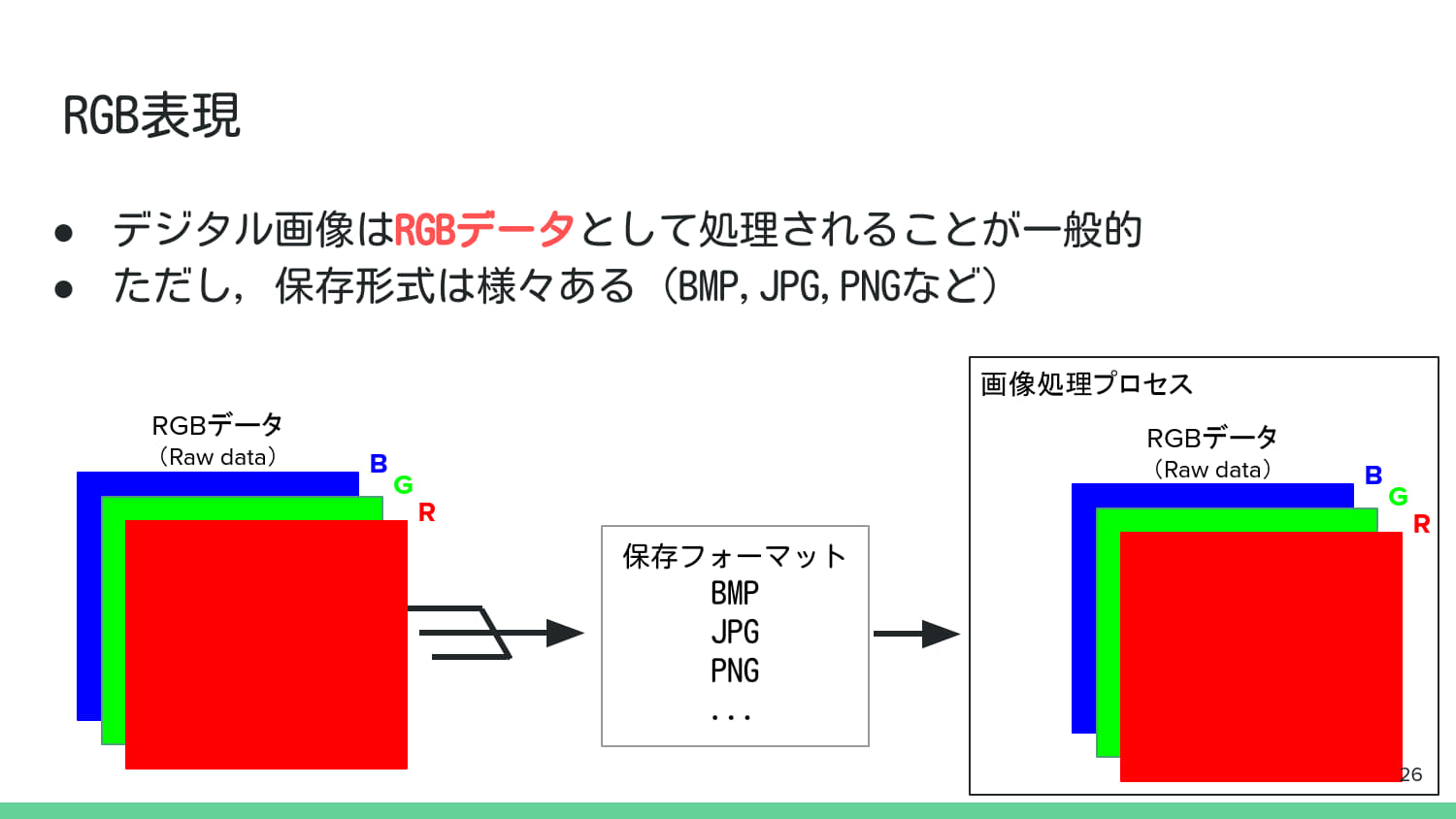
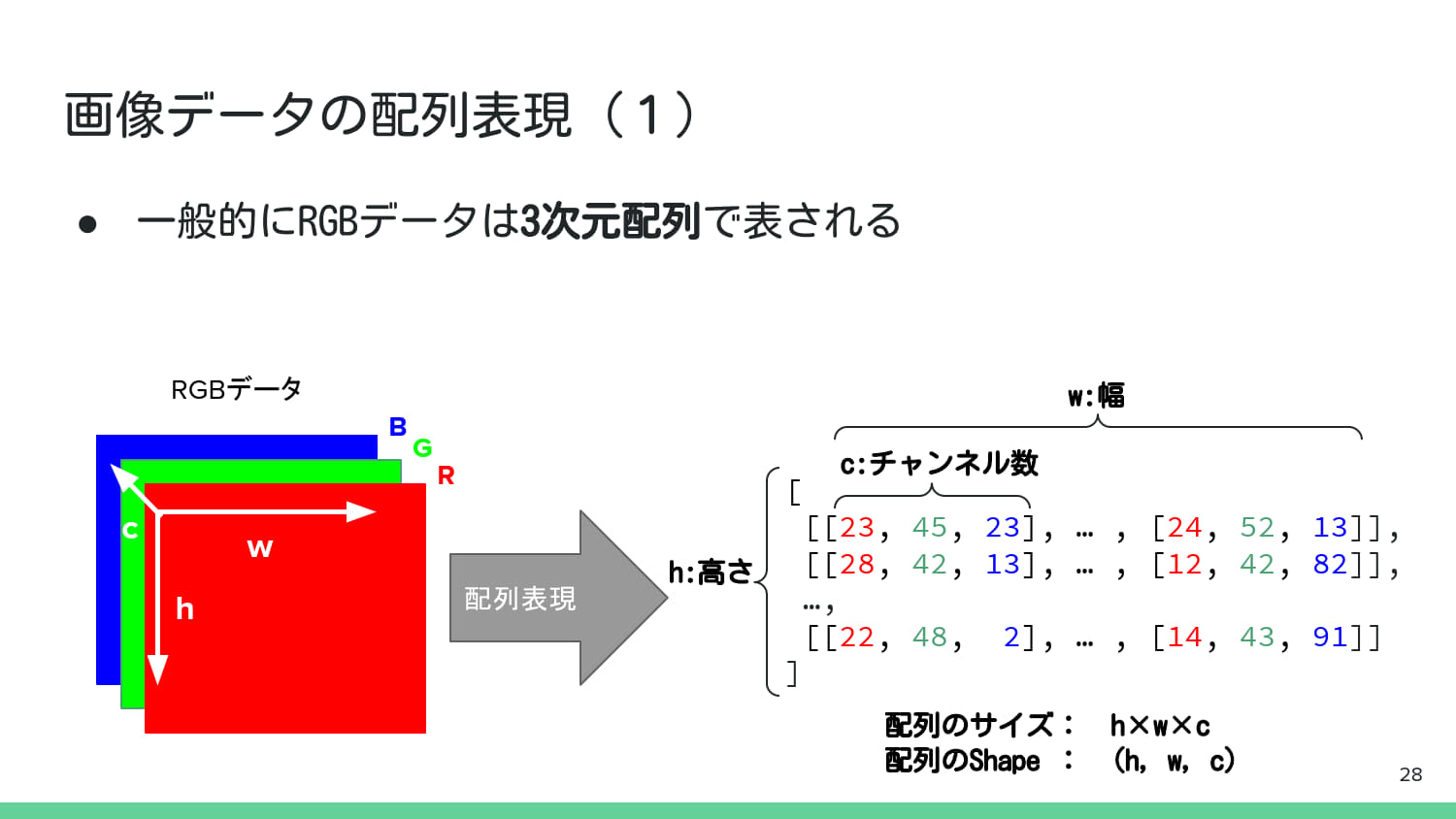
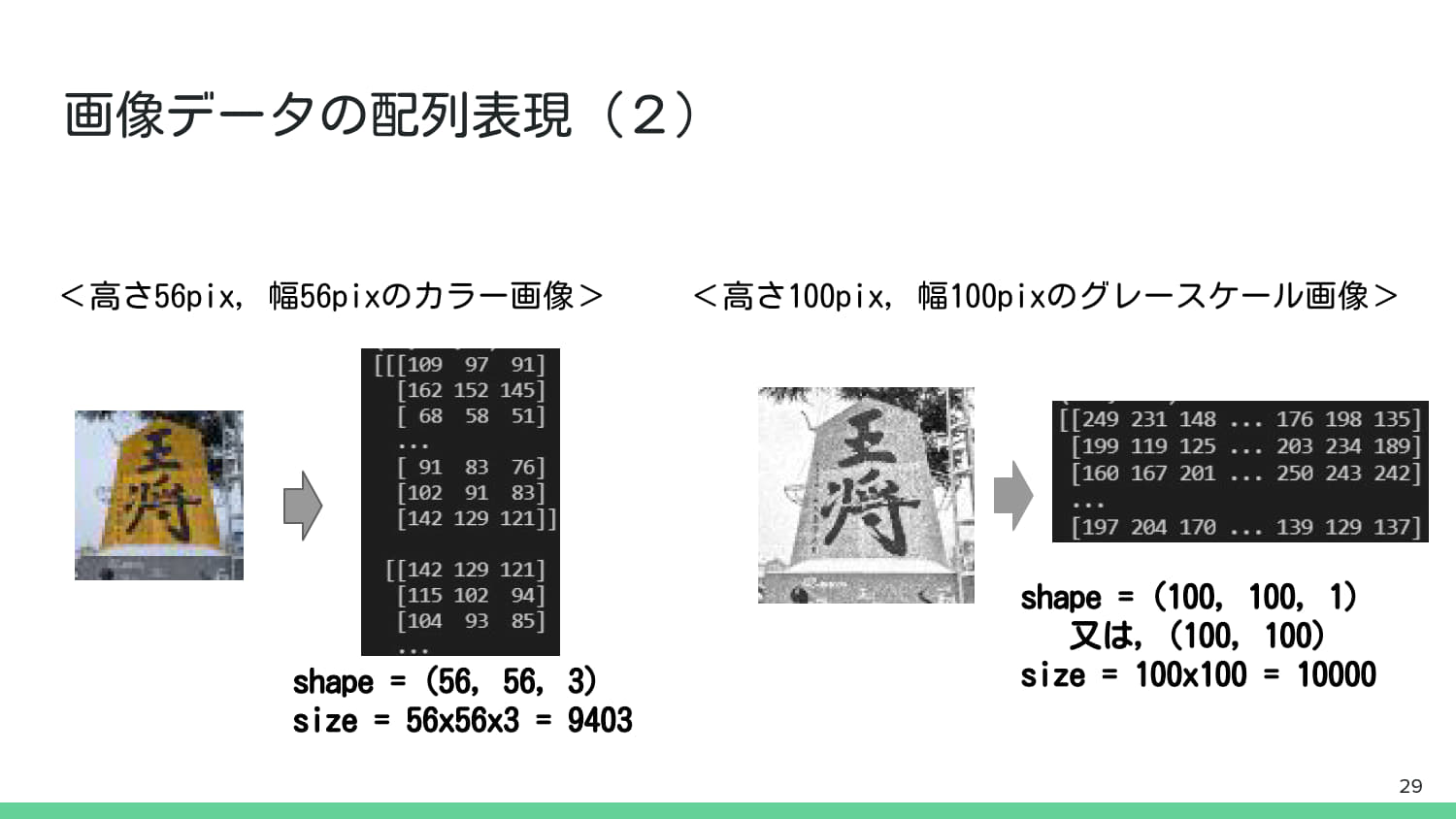
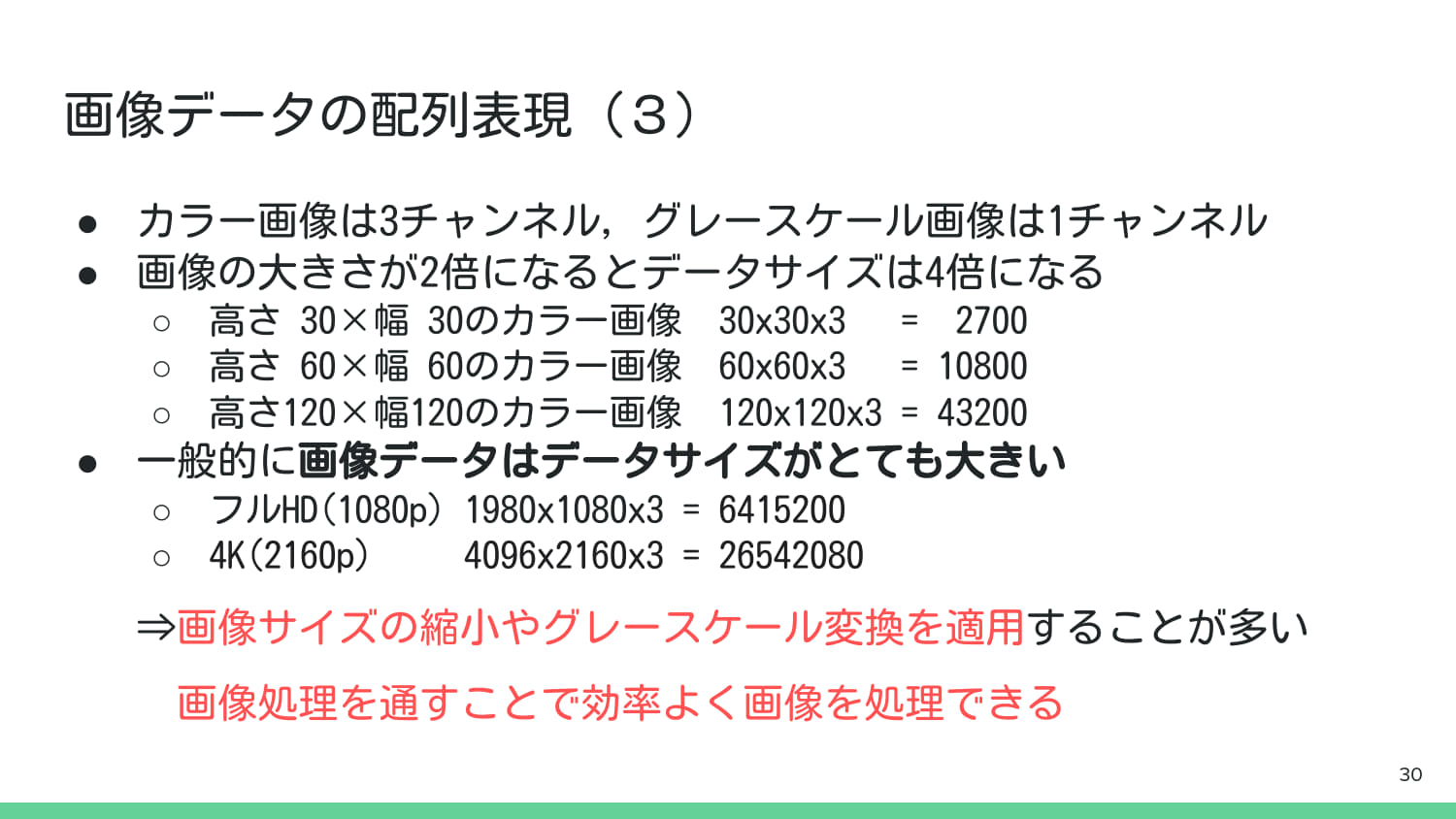
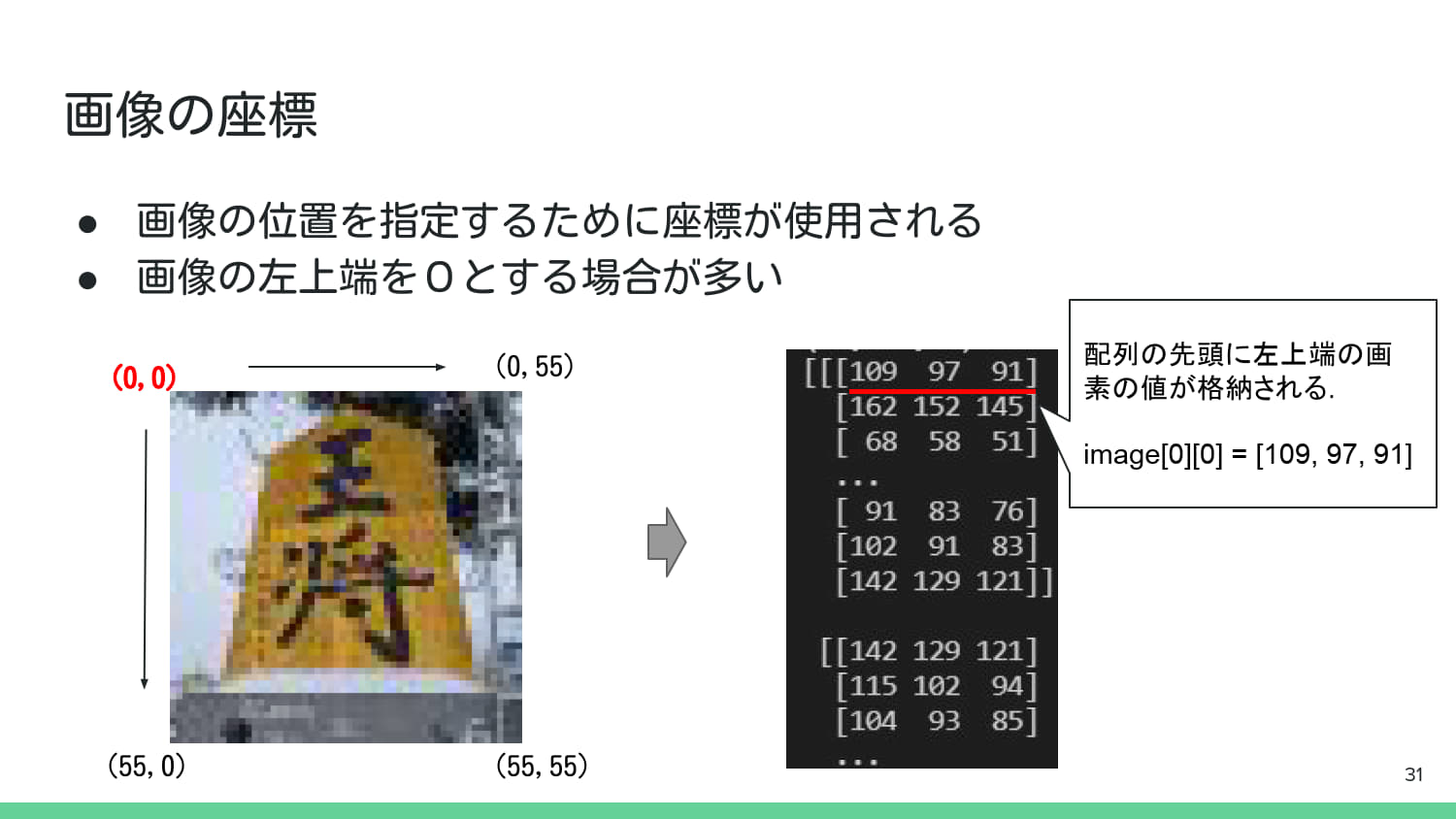
2. デジタル画像処理の基礎知識#
3. 基本的な画像処理#
1. ファイル処理#
画像の読み込み#
openCVを用いて画像を読み込む.
# ライブラリインポート
import cv2
import matplotlib.pyplot as plt
import japanize_matplotlib
import numpy as np
import os
import glob
# 画像の読み込み
img_path = '../data/astronaut.png'
img = cv2.imread(img_path)
画像の表示#
OpenCVはで読み込んだ画像をMatplotlibで表示.
BGR形式で読み込むため,RGB形式に変換して表示する.
# そのまま描画
plt.imshow(img)
plt.title("Astronaut (BGR)")
plt.axis('off')
plt.show()

# RGBに変換して描画
plt.imshow(cv2.cvtColor(img, cv2.COLOR_BGR2RGB))
plt.title("Astronaut (RGB)")
plt.axis('off') # 軸を非表示にする
plt.show()

画像の保存#
OpenCVを用いて画像を保存する.
保存先のディレクトリが存在しない場合は,事前に作成しておく.
# 画像の保存
save_path = 'output/astronaut_saved.png'
os.makedirs(os.path.dirname(save_path), exist_ok=True)
cv2.imwrite(save_path, img)
True
複数画像の一括処理#
os,globを用いて,ディレクトリ内の複数画像を一括で処理する.
# 複数画像の一括処理
# 指定ディレクトリ内のすべてのjpgファイルを取得
img_dir = '../data/'
img_files = glob.glob(os.path.join(img_dir, '*.png'))
# ファイル一覧の表示
print("画像ファイル一覧:")
for f in img_files:
print(f)
# 画像の表示
img_files.sort() # ファイル名でソート
for f in img_files:
img = cv2.imread(f)
plt.imshow(cv2.cvtColor(img, cv2.COLOR_BGR2RGB))
plt.axis('off')
plt.title(os.path.basename(f)) # ファイル名をタイトルに表示
plt.show()
画像ファイル一覧:
../data/brick.png
../data/coffee.png
../data/astronaut.png
../data/chelsea.png


複数画像の表示#
matplotlibのsubplotを用いて,複数画像を一括で表示する.
# 画像読み込み
img1 = cv2.imread('../data/astronaut.png')
img2 = cv2.imread('../data/coffee.png')
# 並べて表示
# plt.figure(figsize=(横幅, 高さ))と指定し,表示領域の大きさを調整
plt.figure(figsize=(8,4))
# plt.subplot(行数, 列数, 何番目)と指定し,表示位置を決定
# 1*2の1番目に描画
plt.subplot(1,2,1)
plt.imshow(cv2.cvtColor(img1, cv2.COLOR_BGR2RGB))
plt.title("Astronaut")
plt.axis('off')
# 1*2の2番目に描画
plt.subplot(1,2,2)
plt.imshow(cv2.cvtColor(img2, cv2.COLOR_BGR2RGB))
plt.title("Coffee")
plt.axis('off')
plt.tight_layout()
plt.show()

演習課題①:dataディレクトリ内にある「jpg」ファイルのみをRGBで読み込み,subplotを用いて2行で表示せよ.#
# 解答欄
2. 色の処理#
グレースケール変換#
RGBの3チャンネル(赤・緑・青)を輝度情報に変換し,1チャンネルにする.
人間の視覚特性に基づき,以下の加重平均で計算される.
Y = 0.299 R + 0.587 G + 0.114 B
import cv2
import matplotlib.pyplot as plt
# 画像の読み込み
img = cv2.imread('../data/astronaut.png')
# グレースケール変換
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 表示
plt.imshow(gray, cmap='gray')
plt.title("Astronaut (Grayscale)")
plt.axis('off')
plt.show()

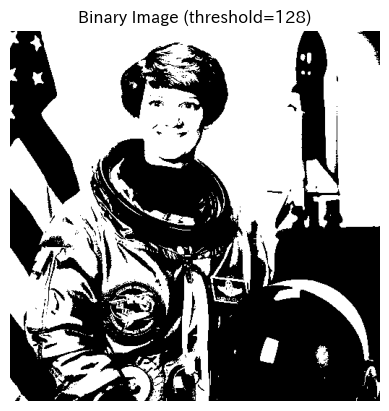
2値化#
ある閾値(thresh)を基準に,明るい部分を白(255),暗い部分を黒(0)に変換する.
# 固定閾値による2値化
thresh = 128
_, binary = cv2.threshold(gray, thresh, 255, cv2.THRESH_BINARY)
plt.imshow(binary, cmap='gray')
plt.title(f"Binary Image (threshold={thresh})")
plt.axis('off')
plt.show()
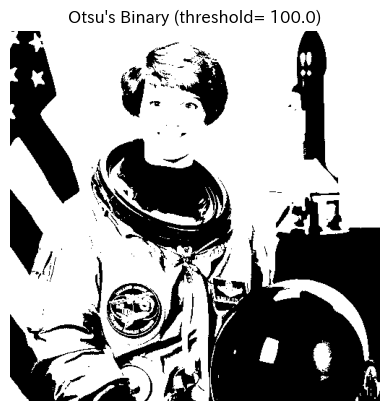
# 大津の2値化(Otsu)
thresh, binary_otsu = cv2.threshold(gray, 0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU)
plt.imshow(binary_otsu, cmap='gray')
plt.title(f"Otsu's Binary (threshold={thresh: .1f})")
plt.axis('off')
plt.show()
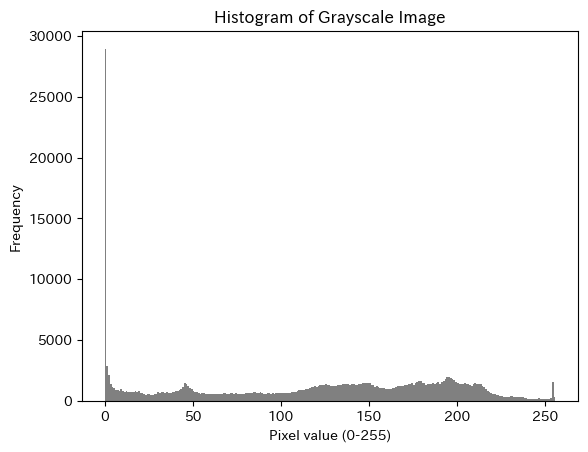
ヒストグラム表示#
画像内の画素値の分布をヒストグラムで表示する.
暗い画像は左側に,明るい画像は右側にピークが寄る.
plt.hist(gray.ravel(), bins=256, range=(0,256), color='gray')
plt.title("Histogram of Grayscale Image")
plt.xlabel("Pixel value (0-255)")
plt.ylabel("Frequency")
plt.show()
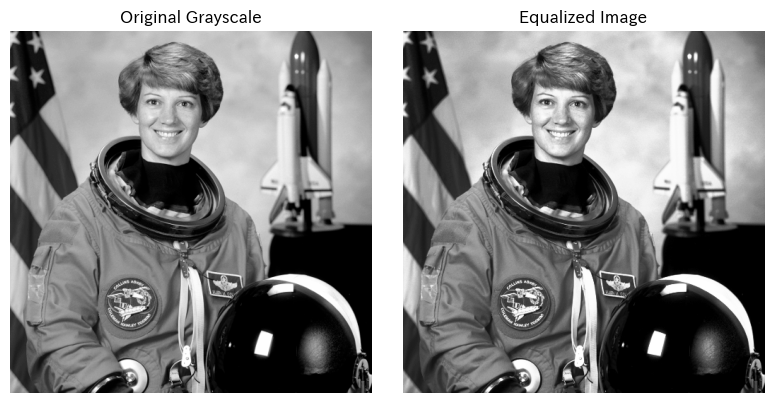
ヒストグラム平坦化#
輝度分布を均等に広げることでコントラストを強調することで,明るい部分と暗い部分の差を大きくなり,見やすくなる.
# ヒストグラム平坦化
equalized = cv2.equalizeHist(gray)
# 元画像と比較表示
plt.figure(figsize=(8,4))
plt.subplot(1,2,1)
plt.imshow(gray, cmap='gray')
plt.title("Original Grayscale")
plt.axis('off')
plt.subplot(1,2,2)
plt.imshow(equalized, cmap='gray')
plt.title("Equalized Image")
plt.axis('off')
plt.tight_layout()
plt.show()
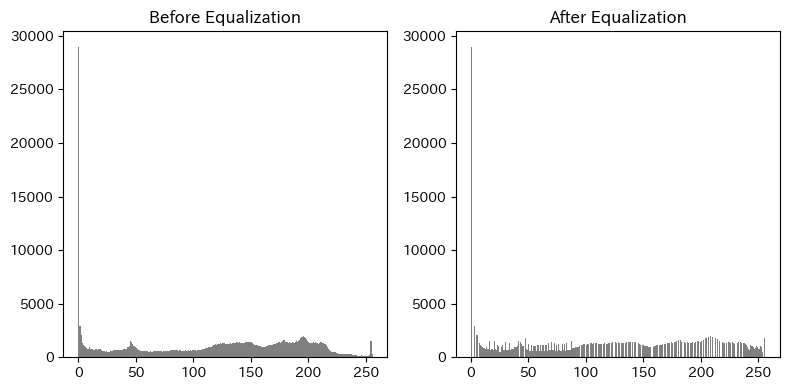
# ヒストグラムの比較
plt.figure(figsize=(8,4))
plt.subplot(1,2,1)
plt.hist(gray.ravel(), bins=256, range=(0,256), color='gray')
plt.title("Before Equalization")
plt.subplot(1,2,2)
plt.hist(equalized.ravel(), bins=256, range=(0,256), color='gray')
plt.title("After Equalization")
plt.tight_layout()
plt.show()
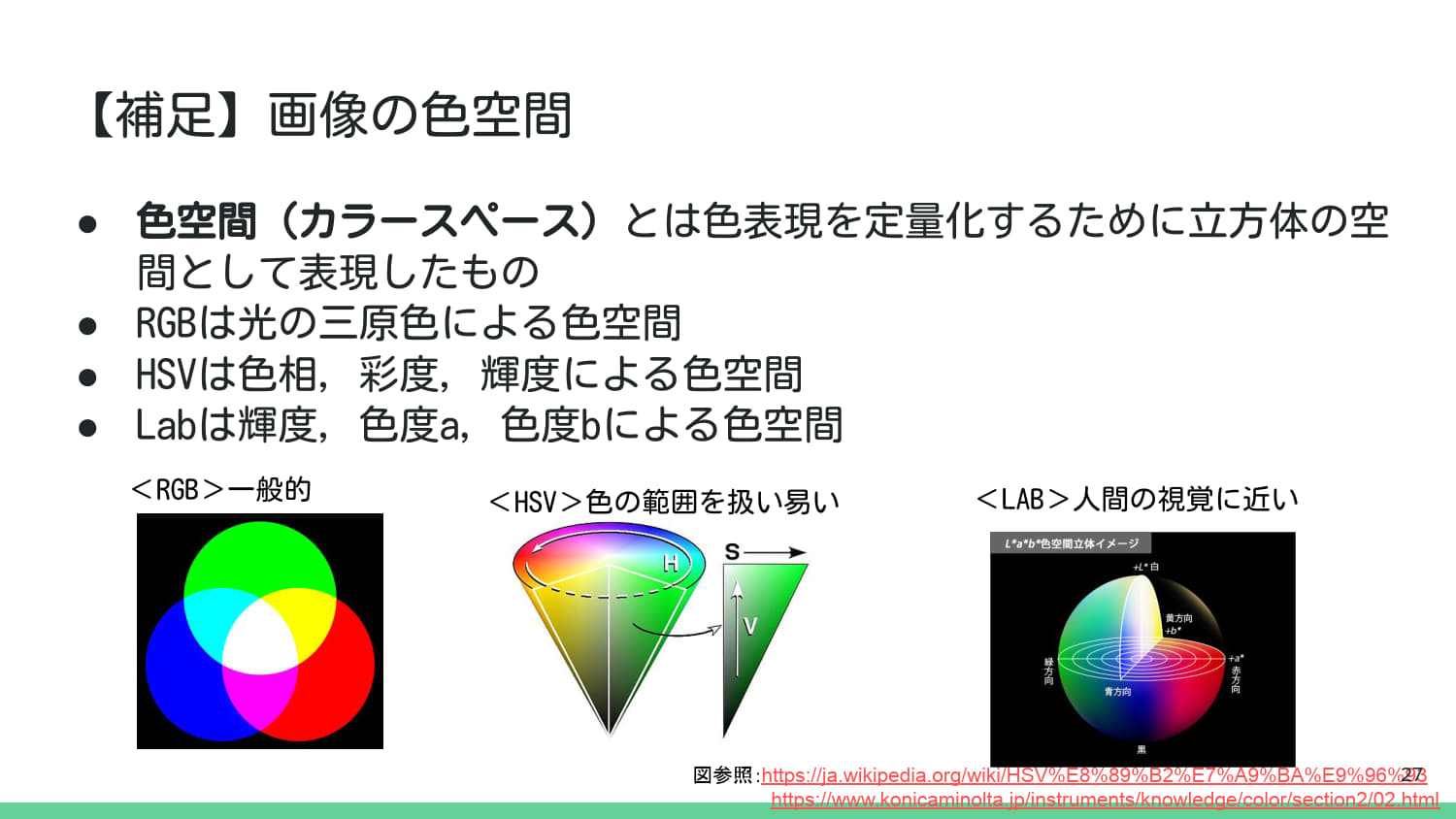
色空間変換(RGB <-> HSV)#
RGB色空間は,赤(Red),緑(Green),青(Blue)の3原色の組み合わせで色を表現する.
HSV色空間は,色相(Hue),彩度(Saturation),明度(Value)の3つの要素で色を表現する.
HSV色空間で扱うことで,色の特徴をより直感的に捉えることができる.

# RGB → HSV
hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
# HSVチャンネル分割
h, s, v = cv2.split(hsv)
# 表示
plt.figure(figsize=(10,4))
plt.subplot(1,3,1)
plt.imshow(h, cmap='hsv')
plt.title("Hue (色相)")
plt.axis('off')
plt.subplot(1,3,2)
plt.imshow(s, cmap='gray')
plt.title("Saturation (彩度)")
plt.axis('off')
plt.subplot(1,3,3)
plt.imshow(v, cmap='gray')
plt.title("Value (明度)")
plt.axis('off')
plt.tight_layout()
plt.show()

演習課題②-1:../data/coffee.pngをグレースケール変換し,ヒストグラムを表示せよ.#
# 解答欄
演習課題②-2:ヒストグラム上で閾値の当りをつけ,2値化した画像を表示せよ.#
# 解答欄
演習課題②-3:大津の二値化を用いて,2値化した画像を表示せよ.#
# 解答欄
3. 幾何学変換#
画像の幾何学変換とは,「画像の座標系を変換する処理」のことを指す.
代表的なものには,リサイズ・トリミング・回転・アフィン変換・射影変換などがある.
これらは,cv2.resize, cv2.warpAffine, cv2.warpPerspective などで実現できる.
リサイズ#
画像の大きさを変更する処理.
OpenCV では cv2.resize() を使用する.
デフォルトでは,縮小時はエリア平均補完,拡大時は双曲線補完が適用される.
# 通常のRGB画像
img = cv2.imread('../data/astronaut.png')
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
print("Original image size:", img_rgb.shape)
# 表示
plt.imshow(img_rgb)
plt.title("Astronaut")
plt.show()
Original image size: (512, 512, 3)
# 1/4のサイズに縮小
img_quarter = cv2.resize(img_rgb, (0, 0), fx=0.25, fy=0.25, interpolation=cv2.INTER_AREA)
print("Quarter size image:", img_quarter.shape)
plt.imshow(img_quarter)
plt.title("Quarter Size")
plt.show()
Quarter size image: (128, 128, 3)
# 2倍のサイズに拡大
img_double = cv2.resize(img_rgb, (0, 0), fx=2, fy=2, interpolation=cv2.INTER_CUBIC)
print("Double size image:", img_double.shape)
plt.imshow(img_double)
plt.title("Double Size")
plt.show()
Double size image: (1024, 1024, 3)
トリミング#
画像の一部を切り出す処理.
配列スライス(img[y1:y2, x1:x2])で簡単に実現できる.
# 画像の中央をトリミング
h, w = img_rgb.shape[:2]
x1, y1 = w//4, h//4
x2, y2 = w*3//4, h*3//4
img_crop = img_rgb[y1:y2, x1:x2]
print("Cropped image size:", img_crop.shape)
plt.imshow(img_crop)
plt.title("Center Cropped")
plt.show()
Cropped image size: (256, 256, 3)
# 画像の左上をトリミング
img_crop_tl = img_rgb[0:h//2, 0:w//2]
print("Top-left cropped image size:", img_crop_tl.shape)
plt.imshow(img_crop_tl)
plt.title("Top-left Cropped")
plt.show()
Top-left cropped image size: (256, 256, 3)
回転#
画像を任意の角度だけ回転させる.
cv2.getRotationMatrix2D() で回転行列を作成し,cv2.warpAffine() で変換を適用する.
h, w = img_rgb.shape[:2]
center = (w//2, h//2)
# 45度回転(時計回り)
M = cv2.getRotationMatrix2D(center, 45, 1.0)
img_rot45 = cv2.warpAffine(img_rgb, M, (w, h))
print("Rotated image size:", img_rot45.shape)
plt.imshow(img_rot45)
plt.title("Rotated 45 degrees")
plt.show()
Rotated image size: (512, 512, 3)
# 反時計周り
M = cv2.getRotationMatrix2D(center, -45, 1.0)
img_rot_neg45 = cv2.warpAffine(img_rgb, M, (w, h))
print("Rotated image size:", img_rot_neg45.shape)
plt.imshow(img_rot_neg45)
plt.title("Rotated -45 degrees")
plt.show()
Rotated image size: (512, 512, 3)
アフィン変換#
アフィン変換は「平行移動+拡大縮小+回転+せん断」を組み合わせた線形変換.
さっきやった拡大や回転もアフィン変換でできる.
3点の対応関係を指定して,cv2.getAffineTransform() で行列を作り,cv2.warpAffine() で適用する.
# 3点の対応を指定
src_pts = np.float32([[50, 50], [200, 50], [50, 200]])
dst_pts = np.float32([[70, 100], [210, 80], [90, 230]])
# 変換行列を計算
M = cv2.getAffineTransform(src_pts, dst_pts)
img_affine = cv2.warpAffine(img_rgb, M, (w, h))
print("Affine transformed image size:", img_affine.shape)
plt.imshow(img_affine)
plt.title("Affine Transformed")
plt.show()
Affine transformed image size: (512, 512, 3)
3点指定が面倒な場合はMを直接記述しても良い.
# 平行移動
tx, ty = 50, 30 # x方向に50px, y方向に30px移動
M_shift = np.float32([[1, 0, tx], [0, 1, ty]])
img_shift = cv2.warpAffine(img_rgb, M_shift, (w, h))
print("Shifted image size:", img_shift.shape)
plt.imshow(img_shift)
plt.title("Shifted")
plt.show()
Shifted image size: (512, 512, 3)
# 回転
(h, w) = img.shape[:2]
center = (w // 2, h // 2)
M = cv2.getRotationMatrix2D(center, angle=30, scale=1.0)
img_rot = cv2.warpAffine(img_rgb, M, (w, h))
print("Rotated image size:", img_rot.shape)
plt.imshow(img_rot)
plt.title("Rotated")
plt.show()
Rotated image size: (512, 512, 3)
# 拡大
M = np.float32([[1.5, 0, 0], [0, 1.5, 0]])
img_scale = cv2.warpAffine(img_rgb, M, (int(w), int(h)))
print("Scaled image size:", img_scale.shape)
plt.imshow(img_scale)
plt.title("Scaled")
plt.show()
Scaled image size: (512, 512, 3)
# せん断の例
import numpy as np
M = np.float32([[1, 0.3, 0], [0.3, 1, 0]]) # x方向に0.3, y方向に0.3のせん断
img_shear = cv2.warpAffine(img_rgb, M, (w, h))
print("Sheared image size:", img_shear.shape)
plt.imshow(img_shear)
plt.title("Sheared")
Sheared image size: (512, 512, 3)
Text(0.5, 1.0, 'Sheared')
※せん断とは,四角形の画像を平行四辺形に変形するような変換のこと.
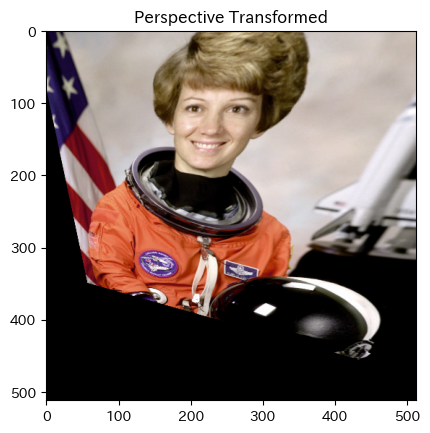
射影変換#
射影変換では,画像を別の平面へ投影するような変換を行う.
例えば,斜めから見た画像を正面視点に補正するなどに使われる.
4点の対応を指定し,cv2.getPerspectiveTransform() と cv2.warpPerspective() を用いる.
# 元画像の4点 (左上, 右上, 右下, 左下)
src_pts = np.float32([[50, 50], [200, 50], [200, 200], [50, 200]])
# 変換後の4点(斜めに変形)
dst_pts = np.float32([[40, 60], [210, 40], [190, 210], [60, 200]])
# 変換行列を計算
M = cv2.getPerspectiveTransform(src_pts, dst_pts)
img_persp = cv2.warpPerspective(img_rgb, M, (w, h))
print("Perspective transformed image size:", img_persp.shape)
plt.imshow(img_persp)
plt.title("Perspective Transformed")
plt.show()
Perspective transformed image size: (512, 512, 3)
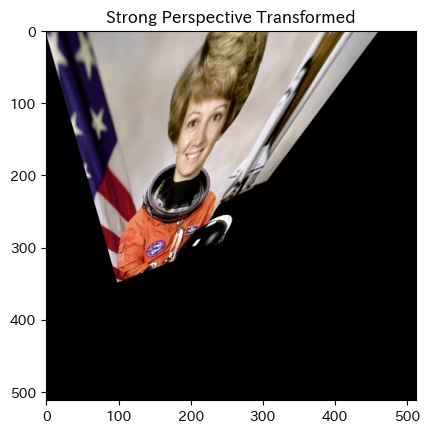
# より大きく傾けた変換(遠近効果を強調)
src_pts = np.float32([[50, 50], [200, 50], [200, 200], [50, 200]])
dst_pts = np.float32([[80, 100], [220, 50], [180, 220], [100, 250]])
M_strong = cv2.getPerspectiveTransform(src_pts, dst_pts)
img_persp_strong = cv2.warpPerspective(img_rgb, M_strong, (w, h))
print("Strong perspective transformed image size:", img_persp_strong.shape)
plt.imshow(img_persp_strong)
plt.title("Strong Perspective Transformed")
plt.show()
Strong perspective transformed image size: (512, 512, 3)
演習課題③:../data/chelsea.pngに対して,トリミング,リサイズ,回転,アフィン変換を行い,結果をsubplotで表示せよ.#
# 解答欄
4. フィルタ処理#
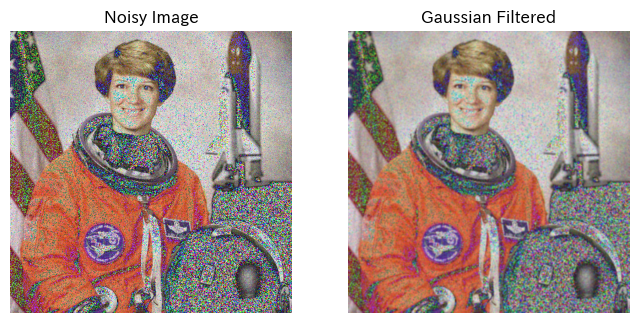
ガウシアンフィルタ(ノイズ低減)#
ガウシアンフィルタは,画像のノイズを低減し,平滑化するために使用される. 加重平均(中心に近い画素ほど重みが大きい)を用いて,ノイズを抑えつつ画像の特徴を保持する.
# ノイズを追加してからガウシアン適用
img_noisy = img_rgb + np.random.normal(0, 25, img_rgb.shape).astype(np.uint8)
img_gauss = cv2.GaussianBlur(img_noisy, (5, 5), 1.0)
plt.figure(figsize=(8,4))
plt.subplot(1, 2, 1)
plt.imshow(img_noisy)
plt.axis('off')
plt.title("Noisy Image")
plt.subplot(1, 2, 2)
plt.imshow(img_gauss)
plt.axis('off')
plt.title("Gaussian Filtered")
plt.show()
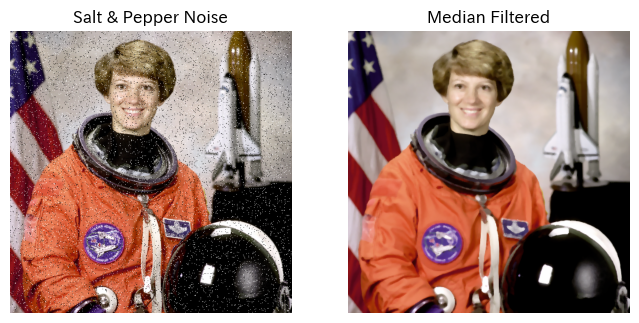
メディアンフィルタ(スパイクノイズ除去)#
各ピクセルをその近傍の中央値で置き換えるフィルタ.
スパイクノイズ(塩胡椒ノイズ)に対して効果的.
# --- Median Filter ---
img_sp = img_rgb.copy()
noise_prob = 0.02
num_salt = np.ceil(noise_prob * img_sp.size * 0.5).astype(int)
num_pepper = np.ceil(noise_prob * img_sp.size * 0.5).astype(int)
# 塩ノイズ(白点)
coords = [np.random.randint(0, i - 1, num_salt) for i in img_sp.shape[:2]]
img_sp[coords[0], coords[1]] = 255
# 胡椒ノイズ(黒点)
coords = [np.random.randint(0, i - 1, num_pepper) for i in img_sp.shape[:2]]
img_sp[coords[0], coords[1]] = 0
img_median = cv2.medianBlur(img_sp, 5)
plt.figure(figsize=(8,4))
plt.subplot(1, 2, 1)
plt.imshow(img_sp)
plt.axis('off')
plt.title("Salt & Pepper Noise")
plt.subplot(1, 2, 2)
plt.imshow(img_median)
plt.axis('off')
plt.title("Median Filtered")
plt.show()
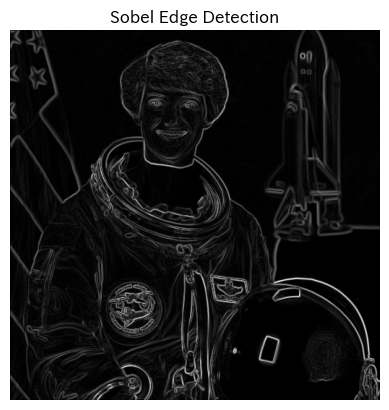
ソーベルフィルタ(エッジ検出)#
ソーベルフィルタは,画像のエッジ(境界)を検出するために使用される.
X方向とY方向の勾配を計算し,エッジの強度と方向を求める.
# --- Sobel Filter ---
gray = cv2.cvtColor(img_rgb, cv2.COLOR_RGB2GRAY)
sobelx = cv2.Sobel(gray, cv2.CV_64F, 1, 0, ksize=3)
sobely = cv2.Sobel(gray, cv2.CV_64F, 0, 1, ksize=3)
sobel = cv2.magnitude(sobelx, sobely)
plt.imshow(sobel, cmap='gray')
plt.axis('off')
plt.title("Sobel Edge Detection")
plt.show()
ラプラシアンフィルタ(エッジ検出)#
2次微分を用いてエッジを検出するフィルタ.
# --- Laplacian Filter ---
gray = cv2.cvtColor(img_rgb, cv2.COLOR_RGB2GRAY)
lap = cv2.Laplacian(gray, cv2.CV_64F, ksize=3)
plt.imshow(lap, cmap='gray')
plt.axis('off')
plt.title("Laplacian Filter")
plt.show()

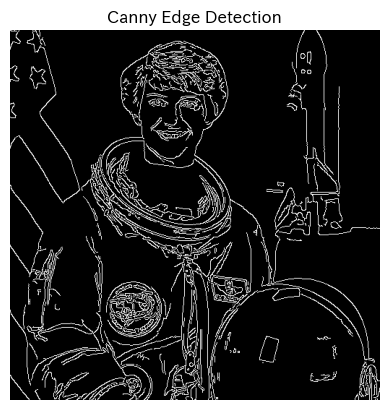
Cannyフィルタ(エッジ検出)#
ガウシアンフィルタとソーベルフィルタを組み合わた手法.
エッジ検出を行う際は最初にこの手法を試すことが多い.
# --- Canny Edge Detection ---
gray = cv2.cvtColor(img_rgb, cv2.COLOR_RGB2GRAY)
edges = cv2.Canny(gray, 100, 200)
plt.imshow(edges, cmap='gray')
plt.axis('off')
plt.title("Canny Edge Detection")
plt.show()
演習課題④:../data/professor_noisy1.jpg~~../data/professor_noisy3.jpgに対して,ノイズ除去フィルタを適用し,除去前画像と除去後画像を表示せよ#
5. その他#
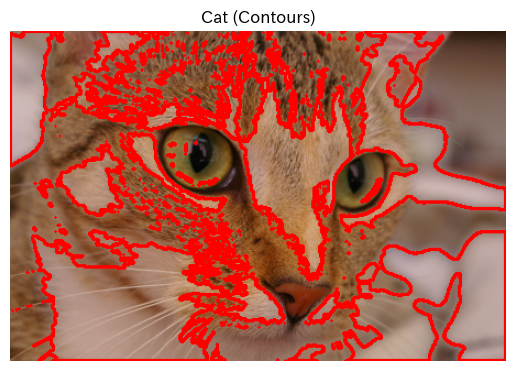
輪郭抽出#
輪郭抽出は,画像内の物体の境界を検出する手法.
OpenCVのcv2.findContours()を用いて,2値化画像から輪郭を抽出できる.
人工物は輪郭がはっきりしているため,輪郭抽出が有効だが,自然物は輪郭が複雑でノイズも多いため,うまくいかないことが多い.
近年は,深層学習を用いたセグメンテーション手法が主流になっている.
# --- Contour Detection ---
gray = cv2.cvtColor(img_rgb, cv2.COLOR_RGB2GRAY)
_, binary = cv2.threshold(gray, 128, 255, cv2.THRESH_BINARY)
contours, _ = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
img_contour = img_rgb.copy()
cv2.drawContours(img_contour, contours, -1, (255, 0, 0), 2)
print("Contour image size:", img_contour.shape)
plt.imshow(img_contour)
plt.title("Astronaut (Contours)")
plt.axis('off')
plt.show()
Contour image size: (512, 512, 3)

# cat画像の輪郭検出
img_cat = cv2.imread('../data/chelsea.png')
img_cat_rgb = cv2.cvtColor(img_cat, cv2.COLOR_BGR2RGB)
gray = cv2.cvtColor(img_cat, cv2.COLOR_BGR2GRAY)
_, binary = cv2.threshold(gray, 128, 255, cv2.THRESH_BINARY)
contours, _ = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
img_contour = img_cat_rgb.copy()
cv2.drawContours(img_contour, contours, -1, (255, 0, 0), 2)
print("Contour image size:", img_contour.shape)
plt.imshow(img_contour)
plt.title("Cat (Contours)")
plt.axis('off')
plt.show()
Contour image size: (300, 451, 3)
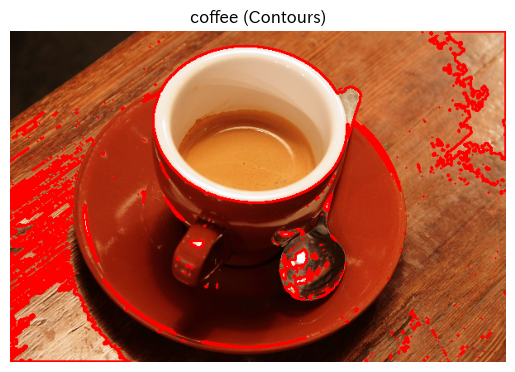
# Coffee画像の輪郭検出
img_coffee = cv2.imread('../data/coffee.png')
img_coffee_rgb = cv2.cvtColor(img_coffee, cv2.COLOR_BGR2RGB)
gray = cv2.cvtColor(img_coffee_rgb, cv2.COLOR_BGR2GRAY)
_, binary = cv2.threshold(gray, 128, 255, cv2.THRESH_BINARY)
contours, _ = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
img_contour = img_coffee_rgb.copy()
cv2.drawContours(img_contour, contours, -1, (255, 0, 0), 2)
print("Contour image size:", img_contour.shape)
plt.imshow(img_contour)
plt.title("coffee (Contours)")
plt.axis('off')
plt.show()
Contour image size: (400, 600, 3)
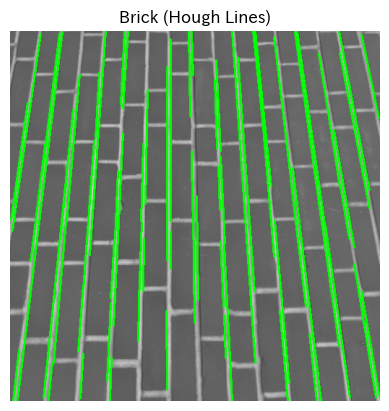
Hough変換(直線検出)#
画像のエッジ情報から,直線を検出する手法.
エッジ検出後に,cv2.HoughLines() や cv2.HoughLinesP() を用いて直線を検出する.
brick_img = cv2.imread('../data/brick.png', cv2.IMREAD_COLOR)
brick_img_rgb = cv2.cvtColor(brick_img, cv2.COLOR_BGR2RGB)
gray = cv2.cvtColor(brick_img_rgb, cv2.COLOR_RGB2GRAY)
edges = cv2.Canny(gray, 50, 150)
lines = cv2.HoughLinesP(edges, 1, np.pi/180, threshold=100, minLineLength=50, maxLineGap=10)
img_hough = brick_img_rgb.copy()
if lines is not None:
for line in lines:
x1, y1, x2, y2 = line[0]
cv2.line(img_hough, (x1, y1), (x2, y2), (0, 255, 0), 2)
print("Hough Line image size:", img_hough.shape)
plt.imshow(img_hough)
plt.title("Brick (Hough Lines)")
plt.axis('off')
plt.show()
Hough Line image size: (512, 512, 3)
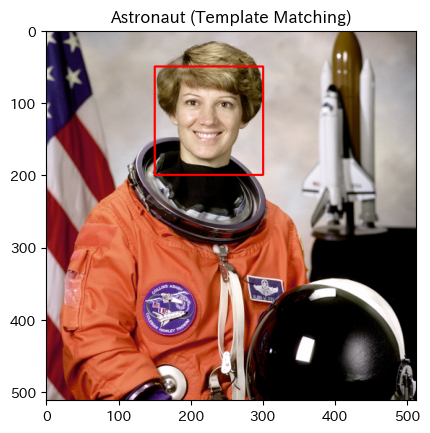
テンプレートマッチング#
テンプレートマッチングは,画像内で特定のパターン(テンプレート)を検出する手法.
テンプレート画像と入力画像の類似度を計算し,最も類似している位置を特定する.
template = cv2.cvtColor(img_rgb[50:200, 150:300], cv2.COLOR_RGB2GRAY) # 適当に切り出し
gray = cv2.cvtColor(img_rgb, cv2.COLOR_RGB2GRAY)
# templateを表示
plt.imshow(template, cmap='gray')
plt.title("Template")
plt.axis('off')
plt.show()
res = cv2.matchTemplate(gray, template, cv2.TM_CCOEFF_NORMED)
min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(res)
top_left = max_loc
h, w = template.shape
bottom_right = (top_left[0]+w, top_left[1]+h)
img_match = img_rgb.copy()
cv2.rectangle(img_match, top_left, bottom_right, (255,0,0), 2)
print("Template Matching image size:", img_match.shape)
plt.imshow(img_match)
plt.title("Astronaut (Template Matching)")
plt.show()
Template Matching image size: (512, 512, 3)
出典#
使用画像: astronaut, brick, chelsea, coffee
出典: scikit-image data / skimage.data
ライセンス: public domain または CC0
参考: https://scikit-image.org/docs/stable/api/skimage.data.html